





روش های کنترل دور موتورهای DC
همان طور که اشاره شد با توجه به پیشرفت الکترونیک قدرت جهت کنترل سرعت ماشین DC ، ماشین های DC تحریک مستقل محبوبیت یافتند. مزایای این ماشین ها عبارت اند از:
- عملکرد عالی
- کنترل پذیری خوب
- کنترل مجزای شار و گشتاور
- کنترل دقیق و وسیع سرعت
با توجه به معادلات ماشین تحریک مستقل می توان برای سرعت معادله زیر را نوشت:
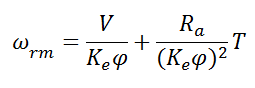
همان طور که در این رابطه مشخص است می توان برای کنترل سرعت یکی از سه پارامتر ولتاژ آرمیچر، شار و مقاومت را تغییر داد بنابراین برای کنترل ماشین DC سه روش وجود دارد که عبارت اند از:
- کنترل ولتاژ آرمیچر
- کنترل شار میدان
- کنترل مقاومت آرمیچر
همان طور که از شکل زیر مشخص است می توان با تغییر ولتاژ آرمیچر سرعت را کنترل کرد:

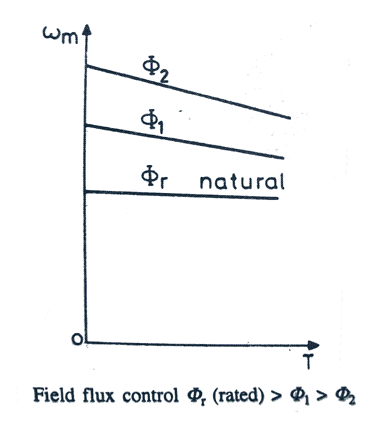
سرعت نیز با تغییر مقدار شار بصورت زیر تغییر می کند:
برای روش کنترل مقاومت آرمیچر نیز داریم:
روش کنترل مقاومت آرمیچر بدلیل داشتن تلفات اضافی دیگر کاربردی ندارد و با توجه به پیشرفت تکنولوژی الکترونیک قدرت روش های اول و دوم بیشتر کاربرد دارند. برای شروع بحث ابتدا باید منحنی عملکرد ماشین DC توضیح داده شود. این منحنی فقط متعلق به ماشین DC نبوده و برای ماشین های AC نیز کاربرد دارد. همان طور که از شکل زیر مشخص است این منحنی به دو ناحیه تقسیم می شود:
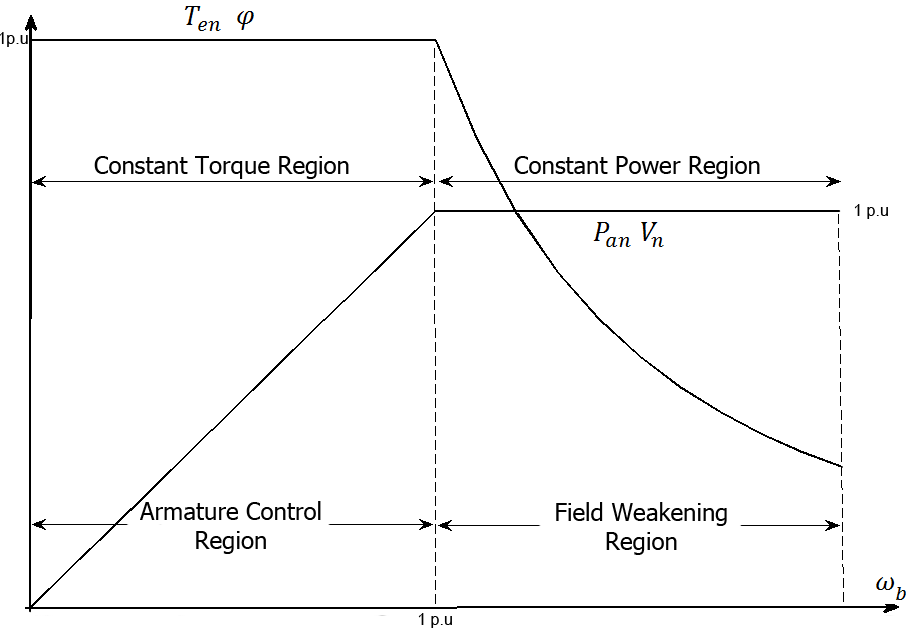
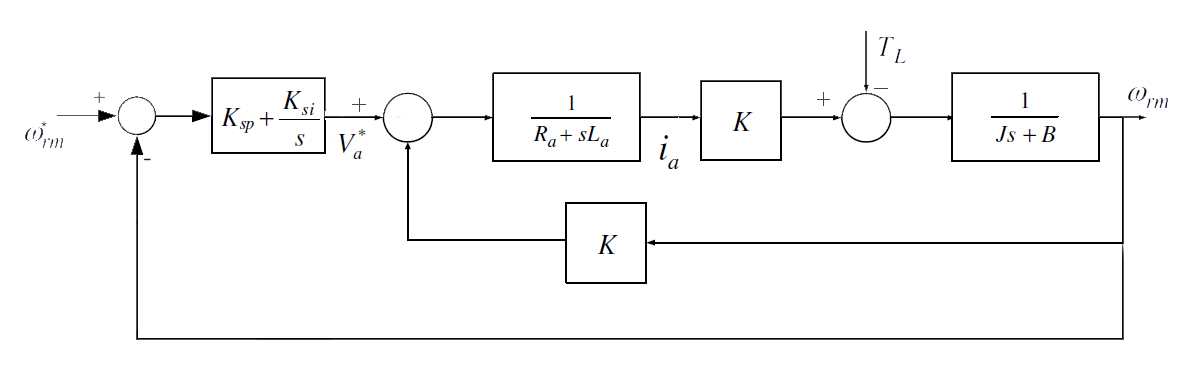
همان طور که مشخص است تا قبل از سرعت نامی موتور در ناحیه گشتاور ثابت می باشیم. در این ناحیه سرعت بوسیله کنترل ولتاژ آرمیچر انجام می شود و شار ثابت می باشد. اگر بخواهیم سرعت را بالاتر از سرعت نامی موتور کنترل کنیم وارد ناحیه توان ثابت می شویم. در این ناحیه باید با ثابت نگه داشتن ولتاژ آرمیچر مقدار شار را کاهش بدهیم. دلیل ثابت نگه داشتن ولتاژ در ولتاژ نامی این است که سیم پیچی آرمیچر برای ولتاژ مشخصی عایق بندی شده و اگر ولتاژ سیم پیچی بیشتر از ولتاژ نامی موتور شود عایق بندی از بین رفته و سیم پیچی اتصال کوتاه می شود. بلوک دیاگرام کنترلی بصورت زیر می باشد:
می توان از کنترل متوالی نیز استفاده کرد:

همان طور که مشخص است در این روش سه حلقه کنترلی مجزا وجود دارد که عبارت اندار:حلقه گشتاور(جریان)، حلقه سرعت و حلقه کنترل زاویه که به ترتیب باید دارای سرعت پاسخ بیشتری باشند. کنترل متوالی در صنعت دارای محبوبیت زیادی می باشد. دلایل این محبوبیت عبارت اند از:
- موتور DC به شدت به جریان آرمیچر و تغییرات شدت جریان آرمیچر حساس است.
- جریان آرمیچر تعیین کننده گشتاور موتور DC می باشد.
اگر بخواهیم موتور را بالاتر از سرعت نامی کنترل کنیم از بلوک زیر استفاده می کنیم:
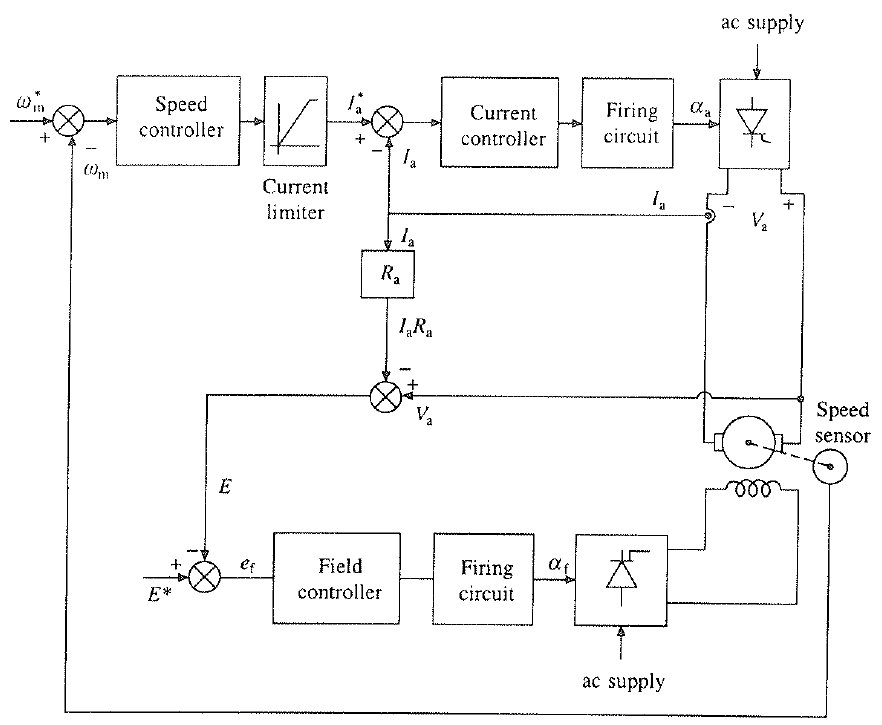
مقدار *E را معمولاً بین ۰٫۸۵ تا ۰٫۹۵ مقدار نامی موتور قرار می دهند. زیر سرعت پایه مقدار ef بزرگ است و بنابراین شار ثابت باقی می ماند ولی بالاتر از سرعت نامی ولتاژ عکس العمل آرمیچر E بزرگتر شده در نتیجه مقدار ef کوچکتر شده و شار کاهش می یابد.
برای دانلود فایل شبیه سازی بر روی عکس زیر کلیک کنید.
|
|
|
مهندسی و فنآوری |
(cached) |
- PWM چیست
- قطعات مورد نیاز برای حالتی که از مسفت استفاده می کنید
- قطعات مورد نیاز برای حالتیکه از ترانزیستور استفاده می کنید
- همچنین ببینید
در این مدرا با کنترل سرعت موتور DC به صورت ساده آشنا می شوید.
 |
PWM چیست
PWM مخفف کلمه لاتین pulse width modulation است.در این روش هدف کنترل سرعت موتور با استفاده از دریافت پالس یا سیگنال است.در این روش سرعت موتور در هنگام حرکت را می شود کم یا زیاد کرد.موتورها در اشکال و اندازه و مشخصات مختلفی در بازار یافت می شوند.که به تبع آن درایور مربوط به سرعت آن ها نیز متفاوت می باشد.سرعت دور یا چرخش یک موتور DC وابسته به تغذیه آن می باشد.به طور مثال اگر یک موتوری که بتواند ولتاژ 12 ولت را تحمل کند به تغذیه 12 ولت متصل کنید و سپس ولتاژ تغذیه آنرا تا مقدار 6 ولت پایین بیاورید.سرعت چرخش آن نصف حالتی خواهد بود.،که شما به آن ولتاژ 12 ولت را می دادید.در حالت PWM کنترل موتور به صورت دستی انجام نمی شود.در این حالت شما موتور را به صورت دستی کنترل نمی کنید.بلکه این میانگین ولتاژ های فرستاده شده توسط مدار درایور موتور است که سرعت موتور را کم و زیاد می کند.هنگامیکه یک فیلم را مشاهد می کنیددر واقع شاهد هزاران عکس ثابت هستید.، که با یک فرکانس بالا آنرا مشاهده می کنید.سرعت پخش شدن عکس ها آنقدر زیاد است که مغز شما فواصل زمانی بین پخش شدن و عدم پخش شدن را نمی تواند تشخیص دهد.
در واقع مغز شما میانگین این عکس ها را مشاهده می کند.در کنترل PWM نیز همین وضعیت وجود دارد.آنقد سرعت روشن و خاموش شدن زیاد است.که شما متوجه آن نمی شوید.هر چه فرکانس کاری بالاتر باشد.موتور سریعتر روشن و خاموش می شود.و در واقع میانگین،چیزی که شما مشاهده می کنید سرعت بیشتر موتور و زمانیکه فرکانس پایین باشد.فواصل زمانی روشن و خاموش شدن موتور کمتر می شود که شما میانگین آنرا با سرعت کمتر موتور مشاهده خواهید کرد.در واقع مانند یک فیلم شما نیز میانگین روشن و خاموش شدن را می بینید.در این حالت مغز شما سرعت این روشن و خاموش را به صورت سرعت کم و زیاد مشاهد خواهید کرد.در زیر دو نمونه عملی و ساده یک مدار کنترل دور موتور با استفاده از پهنای پالس را مشاهده می کنید.
قطعات مورد نیاز برای حالتی که از مسفت استفاده می کنید
- 1 عدد آی سی 4093
- 1 عدد پتانسیومتر 100 کیلو اهم
- 1 عدد خازن 103
- 1 عدد مقاومت 1 کیلو اهم
- 2 عدد دیود 1N4148
- 1 عدد دیود 1N4007
- 1 عدد ترانزیستور اثر میدان (مسفت)BUZ80
- 1 عدد موتور DC با رنج دلخواه 5 تا 18 ولت
- برد بورد یا برد مسی سوراخدار
- سیم تلفنی در صورت استفاده از برد بورد
نقشه مدار به همراه توضیحات
قبل از هر چیز می بایست بگویم.،دیود موجود در مسفت یک دیو داخلی است.،آنرا به عنوان یک المان مجزا در نظر نگیرید.آی سی 4093 دارای 4 عدد گیت NAND با ورودی هایی است .،که به صورت اشمیت تریگر عمل می کند.ورودی های آن هم می توانند ولتاز های مثبت و هم ولتاژ های منفی باشند.و میزان ولتاژ های ورودی آن دارای محدوده بیشتری از لحاظ حداقل و حداکثر نسبت به 4011 می باشد.
برای تجسم بهتر عملکرد مدار در کنار نقشه مدار، ساختمان داخلی آی سی 4093 را نیز مشاهده می کنید.همانطور که در نقشه مشاهده می کنید تمامی ورودی های آی سی 4093 بجز پایه های 2 و 1 به یکدیگر متصل شده اند.و تمامی این ورودی ها به پایه خروجی 3 که نتیجه ورودی 1 و 2 آی سی 4093 است.به صورت مشترک وصل شده اند.
مقاومت 1 کیلو اهم به همرا پتانسیومتر 100 کیلو اهم و خازن 103 کار تولید پالس را در اولین گیت آی سی 4093 به عهده دارد.این گیت با توجه به سیم بندی مدار گیت های دیگر را نیز تحت تاثیر قرار می دهد.
با پیچاندن پتانسیومتر نیز می توانید سرعت موتور را کم یا زیاد کنید.در واقع با پیچاندن پتانسیومتر مدار RC را که از حاصلضرب مقاومت 1 کیلو اهم به همراه پتانسیومتر 100 کیلو اهم در خازن10 نانو فاراد ایجادمی شود.،را کم و زیاد می کنید.با پیچاندن پتانسیومتر تا انتهای یک سمت سرعت موتور حداکثر و با پیچاندن پتانسیومتر تا انتهای سمت دیگر سرعت آن حداقل می شود تا اینکه به صفر می رسد.البته با وجود مقاومت 1 کیلو اهم در مدار حتی اگر با پیچاندن پتانسیو متر مقاومت ایجاد شده را به صفر برسانید.مقاومتی که در پایه 2 موجود است به مقدار حداقل یک کیلواهم خواهد رسید.مقدار فرکانس پالس مربعی ایجاد شده در پایه 1و 2 از حاصلضرب مجموع مقاومت یک کیلو اهم و پتانسیومتر 100 کیلو اهم در خازن 10 نانو فاراد بدست می اید که این حاصلضرب را در دو حالت برای شما حساب می کنم.البته حالت های زیادی در اثر پیچاندن پتانسیومتر و تغییر مقاومت کل مجموع بدست می آید.که شما نیز به راحتی می توانید این حالت ها را محاسبه کنید.
حالتی را در نظر بگیرید.که پتانسیومتر مقاومت 100 کیلو اهم را داشته باشد.در این حالت مجموع دو مقاومت 101 کیلو اهم می شود.که حاصلضرب مقاومت 101 کیلو اهمی در خازن 10 نانو فارادی معادل 10 به توان،منفی 3 می شود.برای بدست آوردن فرکانس بایست این حاصلضرب را برعکس کنید که نتیجه معادل یک کیلو هرتز خواهد شد.در حالتی که پتانسیومتر مقدار 0 را داشته باشد.فرکانس کاری مدار از حاصلضرب،مقاومت 1 کیلو اهم در خازن 10 نانو فاراد بدست می آید.که این مقدار معادل 100 کیلو هرتز می شود.به یاد داشته باشید.که کیلو معادل 1000 و نانو معادل 10 به توان،منفی 9 می باشد.
با تعویض جای دیود های متصل به پایه های پتانسیومتر می توانید جهت حداکثر و حداقل شدن سرعت را با انتهای پتانسیومتر تنظیم کنید.یعنی اینکه در چه سمت که پتانسیومتر را می پیچانید سرعت زیاد یا کم شود.این دیودها همچنین مکان ورود پالس های مثبت و منفی از پایه 3 نیز می باشند.
تمامی خروجی های 4 ، 10 و 11 از آی سی 4093 به یکدیگر مشترک شده.و به گیت مسفت BUZ80 متصل می شوند.زمانیکه در مسفت ولتاژ در گیت از ولتاژ آستانه هدایت که در اینجا Vth نام دارد بیشتر شود.جریانی از سورس به سمت درین خواهیم داشت.
(در واقع در این وضعیت مسفت روشن می شود.در ترانزیستورهای اثر میدان مسفت درین دارای قطبیت مثبت و سورس دارای قطبیت منفی است.به طوریکه اگر ولتمتر در اختیار داشته باشد.می توانید این پایه های را حتی اگر به اطلاعات مربوط به پایه های ترانزیستورهای اثر میدان دسترسی نداشته باشید براحتی پیدا کنید.ولتمتر را در حالت تست دیود قرار دهید.در ترانزیستورهای اثر میدان این درین است که به سورس راه می دهد.و سورس به درین راه نمی دهد.اگر به این مسفت و سمت نوشته های روی آن نیز دقت کنید.اولین پایه از سمت چپ گیت ،دومین پایه درین و پایه سوم سورس خواهد بود.)
همانطور که در نقشه مشاهده می کنید.،یک سمت موتور به صورت مستقیم به مثبت ولتاژ متصل است.بنابراین موتور برای حرکت احتیاج به زمین دارد.که این زمین،توسط سورس مسفت بر روی درین و از آنجا بر روی یک سمت موتور ایجاد می شود.
در واقع موتور برای حرکت احتیاج به اختلاف پتانسیل دارد.که این اختلاف پتانسیل توسط آی سی 4093 به همراه مسفت BUZ80 در موتور ایجاد می شود.ایجاد این زمین در یک سمت موتور بستگی به فرکانس ایجاد شده در پایه های 1و 2 متاثر از خازن و مقاومت خواهد داشت.که این مسئله را نیز به راحتی با قرار دادن مقادیر متفاوتی از خازن و مقاومت براحتی می توانید تجربه کنید.
در مسفت مقدار جریان ایجاد شده با توجه به رابطه ای که در آن نیز حاکم است به سطح ولتاژ ورودی در گیت کاملا وابسته است.هر چه قدر این ولتاژ بیشتر باشد.شدت جریان ایجاد شده نیز بیشتر خواهد بود.در این وضعیت اگر ولتمتر در اختیار داشته باشد.،و یک سر سیم آنرا به زمین این مدار و سر دیگر آنرا به پایه گیت مسفت متصل کنید.مشاهده می کنید که با پیچاندن پتانسیومتر سطح ولتاژ در این پایه ممکن است.،کم یا زیاد شود.در سمتی که پتانسیومتر را می پیچانید.و میزان ولتاژ دیده شده در ولتمتر شروع به افزایش می کند.،در این وضعیت موتور نیزسرعتش زیاد می شود..همین مطلب را نیز به صورت برعکس می توانید تجربه کنید.در این حالت سرعت موتور رو به کاهش می رود.
برای افزایش جریان، پایه های خروجی 4،10 و 11 با یکدیگر مشترک شده اند.تا برای تقویت جریان به گیت مسفت احتیاجی به تقویت کننده ای مثل ترانزیستور ها نباشد.
در مسفت ها با توجه به کم بودن مقاومت Rds تلفات حرارتی کمتری را نسبت به ترانزیستورهای BJT خواهیم داشت.
 |
 |
قطعات مورد نیاز برای حالتیکه از ترانزیستور استفاده می کنید
- 1عدد آی سی 4093
- 1عدد پتانسیومتر 50 کیلو اهم
- 1عدد مقاومت 1 کیلو اهم
- 1عدد مقاومت 100 اهم
- 2عدد ترانزیستورC1815
- 2عدد دیود 1N4148
- 1عدد دیود 1N4007
- 1 عدد خازن 100 نانو فاراد
- 1 عدد موتور DC بسته به نیاز 5 تا 12 ولت
- 1 عدد خازن 100 میکرو فاراد
- 1 عدد خازن 10 نانو فاراد
نقشه مدار به همرا توضیحات
در این نقشه مانند حالت قبل کار تولید پالس را مقاومت های یک کیلو و پتانسیومتر صد کیلو اهم و خازن 10 نانو فاراد به عهده دارند.پایه 3 نیز مانند حالت قبل به پایه های ورودی 5 و 6 گیت دوم NAND از آی سی 4093 متصل می باشد.و خروجی 4 آی سی 4093 با یک مقاومت 100اهم،به بیس ترانزیستور C1815 متصل است.در این مدار به جای مسفت از ترانزیستورهای BJT استفاده شده است.در این حالت نیز مانند حالت قبل یک سر موتور به مثبت ولتاژ متصل است.وجهت حرکت موتور احتیاج به زمین داریم.،که این زمین در سر دیگر موتور و از طریق دو عدد ترانزیستور موجود در مدار ایجاد می شود.ترانزیستورها همانطور که مشاهده می کنید به صورت دارلینگتون بسته می شوند.دراین حالت مقدار جریان ایجاد شده در کلکتور ترانزیستور جهت حرکت موتور بیشتر می شود.،و همچنین موتور با کو چکترین تحریک بیس ترانزیستور رو شن خواهد شد.اگر ولتمتر در اختیار داشته باشد می توانید نکات جالبی را مشاهده کنید.به طور مثال زمانیکه پتانسیومتر را در یک سمت تا انته می پیچانید.و موتور خاموش می شود.اگر ولتاژ موجود در پایه 3 آی سی 4093 را اندازه بگیرید مقدار آن نزدیک به مقدار مثبت منبع تغذیه است.اگر تغذیه شما به طور مثال 5 ولت باشد.در این حالت،پایه 3 ولتاژ 5 ولت را نشان می دهد.این پایه به پایه های 5 و 6 که هر دو، وردودی های دومین گیت NAND موجود در این آی سی هستند.مطابق نقشه اتصال دارد.بنابراین با توجه به اینکه گیت NAND تنها زمانی خروجی آن صفر می شود که هر دو ورودی آن یک باشد.در این حالت خروجی 4 مقدار صفر را دارد.وترانزیستور همچنان خاموش است.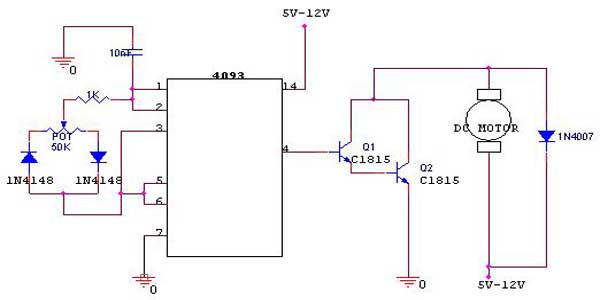 |
همچنین ببینید
فهرست پروژه های الکترونیکدانلود پروژه کامل کنترل دور موتور DC از طریق PWM میکرو AVR با بسکام
 |
موقعیت شما: خانه\ AVR \ پروژههای AVR بیسیک \ دانلود پروژه کامل کنترل دور موتور DC از طریق PWM میکرو AVR با بسکام |

در مورد این پروژه فقط می توانم بگم که تا دانلود نکنید پی به ویژگی های آن نمی برید . این پروژه به دست KING و زحمت فراوان Lord برای شما دوستان تهیه گردیده …!! از بارز ترین ویژگی های آن :
۱_ کنترل موتور از طریق PWM میکرو .
۲_ کم و زیاد کردن سرعت .
۳_ تغییر جهت آن به صورت چپ گرد و راست گرد .
۴_ راه اندازی موتور توسط L298
5_برنامه نویسی از طریق BASCOM
پی آیسی پارس
![]() لطفا مقالات، آموزشها و پروژه های خود را به آدرس
لطفا مقالات، آموزشها و پروژه های خود را به آدرس  ایمیل نمائید تا آن را با نام خودتان در سایت منتشر کنیم.
ایمیل نمائید تا آن را با نام خودتان در سایت منتشر کنیم.
| ||
