Connecting nRF24L01 and Arduino
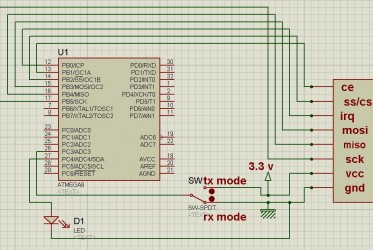
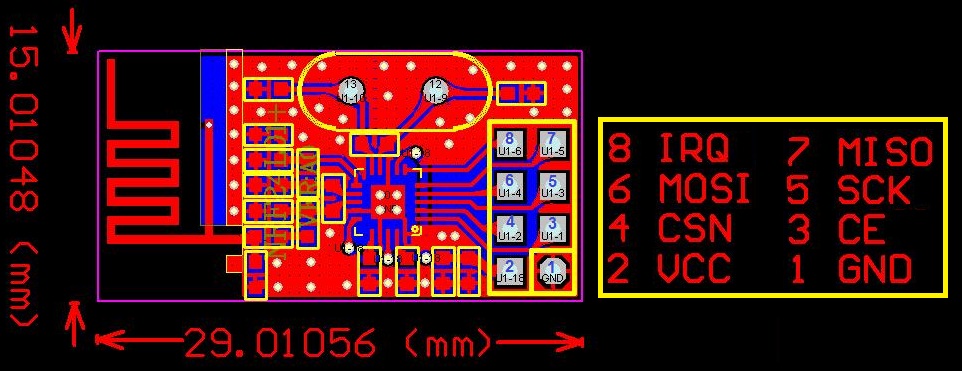
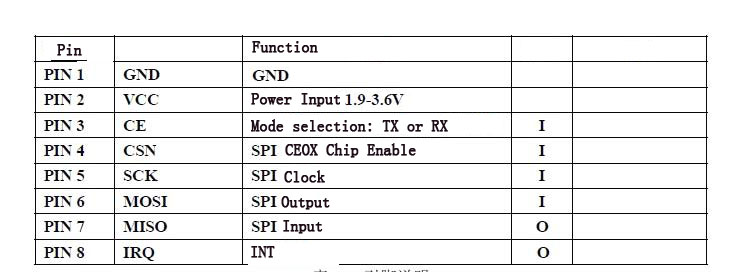
Now, when we know nRF24L01 module pinout we can now connect it to Arduino or some other board. Just connect pins on the same name on Arduino board and nRF24L01 wireless module:
Connecting nRF24L01 and Arduino4
Schematic is very universal and fits for all the Arduino’s: UNO, DUE, MEGA, Leonardo, Yun etc. (Arduino 1.0 (R3) standard, but also with older boards)
SPI signals are in the ICSP connector. For connecting we suggest using female/female jumper wires (type FF). The rest of the signals can be connected using a female/male jumper wires (type FM).
Connect power pins from nRF to Arduino as shown below:
| nRF24L01 |
ARDUINO |
| VCC |
3.3V |
| GND |
GND |
CE and CSN pins can be connected to any digital pins. Then in RF24 library, you can specify which pins you used. I chose pins 7 and 8 because I will use them in the examples.
On Arduino UNO boards SPI pins are connected with some digital pins. While using modem you most remember that these digital pins won’t be available.
- MOSI is connected to the digital pin 11
- MISO is connected to the digital pin 12
- SCK is connected to the digital pin 13
- SS (not used, but also blocks) is connected to the digital pin 10
The Arduino MEGA 1280 and 2560 have a similar situation.
- MOSI is connected to the digital pin 51
- MISO is connected to the digital pin 50
- SCK is connected to the digital pin 52
- SS is connected to the digital pin 53
On the Arduino DUE, Yun and Leonardo SPI pins are on ICSP connector, and are independent
of the digital pins.
دانلود آموزش فارسی راه اندازی ماژول وایرلس NRF24L01
+کدهای گیرنده و فرستنده+کتابخانه+پاورپوینت توضیحات و شماتیک
در قالب یک پروژه کاملا عملی
Programming nRF24L01
Having module connected, we need to program it. First program you probably know, we’ll make traditional “Hello World”.
We will make one device (with the modem), will send the string to the other device. The second device will send the received string to a stationary computer and them will display it in the Arduino Serial Port Monitor.
In this project we used RF24 library, which can be found on Github: RF24 library on Github.You only need to click on “Download ZIP” button and it’ll start downloading all necessary things. You can install the library in Arduino IDE using Sketch-> Import library-> Add library. Another way is to extract the zip file to your Arduino home directory: Arduino/libraries on Linux or Documents/ Arduino/libraries in Windows.
Transmitter program will look like:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8);
const byte rxAddr[6] = "00001";
void setup()
{
radio.begin();
radio.setRetries(15, 15);
radio.openWritingPipe(rxAddr);
radio.stopListening();
}
void loop()
{
const char text[] = "Hello World";
radio.write(&text, sizeof(text));
delay(1000);
}
At the beginning of the sketch we infrom the program that we’ll use libraries.
- SPI.h – to handle the communication interface with the modem
- nRF24L01.h – to handle this particular modem driver
- RF24.h – the library which helps us to control the radio modem
Next, we need to create an object called “radio”
RF24 radio(7, 8);
This object represents a modem connected to the Arduino. Arguments 7 and 8 are a digital pin numbers to which signals CE and CSN are connected. If you have connected them to other pins can change this arguments. Then I create a global array called “rxAddr“.
const byte rxAddr[6] = "00001";
In this array we wrote the address of the modem, that will receive data from Arduino. Address has value “00001”, but if you want you can change it to any other 5-letter string. The address is necessary if you have a few modems in the network, thanks to the address, you can choose a particular modem to which you are sending the data. In the “setup” function we call the method “radio.begin ();” . It activates the modem.
Next we call “radio.setRetires(15, 15);” function. It shows how many times the modem will retry to the send data in case of not receiving by another modem. The first argument sets how often modem will retry. It is a multiple of 250 microseconds. 15 * 250 = 3750. So, if the recipient does not receive data, modem will try to send them every 3.75 milliseconds. Second argument is the number of attempts. So in our example, modem will try to send 15 times before it will stop and finds that the receiver is out of range, or is turned off.
The method of “radio.openWritingPipe (rxAddr);” sets the address of the receiver to which the program will send data. Its argument is an array previously made with the receiver address.
The last method in the “setup” function is “radio.stopListening ();“. It switch the modem to data transmission mode.
In the “loop” function, we start with creating a string that we want to send using modem.
const char text[] = "Hello World";
It’s an array of characters/letters to which we assigned a “Hello World” text. Then, using the method of “radio.write (& text, sizeof (text));” we send text through the radio to the modem (the address of the modem was set up earlier using “openWritingPipe”). First argument is an indication of the variable that stores the data to send. That’s why we used “&” before the variable name, so we can make an indicator from this variable. The second argument is the number of bytes that the radio will take from a variable to be sent. Here we used the function “sizeof ()“, which automatically calculates the number of bytes in a “text” string.
Through this method, you can send up to 32 bytes at one time. Because that is the maximum size of a single packet data modem. If you need confirmation that the receiver received data, the method “radio.write” returns a “bool” value. If it returns “true” , the data reached the receiver. If it returns “false” this data has not been received.
The “radio.write” method blocks the program until it receives the acknowledgment or until you run out of all attempts to transmit established methods set in “radio.setRetires“.
The last part of the “loop” function is “delay (1000);“. It blocks the program for 1000 milliseconds, or one second. It makes the program will sent “Hello World” every second to
the receiver.
دانلود آموزش فارسی راه اندازی ماژول وایرلس NRF24L01
+کدهای گیرنده و فرستنده+کتابخانه+پاورپوینت توضیحات و شماتیک
در قالب یک پروژه کاملا عملی
The receiver
The program of the receiver in the second modem device will look like this:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8);
const byte rxAddr[6] = "00001";
void setup()
{
while (!Serial);
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, rxAddr);
radio.startListening();
}
void loop()
{
if (radio.available())
{
char text[32] = {0};
radio.read(&text, sizeof(text));
Serial.println(text);
}
}
The program looks quite similar to the program of the transmitter. First we selected libraries which will be used and then we creates a “radio” object with selected control pins. In the next line you can see a table with the address of the receiver – the same as in the transmitter. At the beginning of the “setup” function we set the object “Serial” for communication Arduino with the computer.
while (! Serial);
This part is waiting for the Arduino USB port switches to serial COM port when You connect USB cable. That is true for Arduino with ATmega32u4 – like Leonardo, for ATmega328 based boards, which have separate chip for USB/Serial communication Serial is available always. The method of “Serial.begin (9600);” sets the baud rate with the computer via USB / COM.
The next part of the function is to set the nRF24L01 modem. Like before we used “radio.begin ();” method. The next line of the program is “radio.openReadinPipe (0, rxAddr);“, which determines the address of our modem which receives data. The first argument is the number of the stream. You can create up to 6 streams that responds to different addresses. We created only address for the stream number 0. The second argument is the address to which the stream will react to collect the data. In this example we set the address assigned to a “rxAddr” array.
The next step is to enable receiving data via modem using the method “radio.startListening ();“. From that moment the modem waits for data sent to the specified address. In the “loop” function, program performs the following operations. First checks whether any data have arrived at the address of the modem using the method “radio.available ();“. This method returns a “true” value if we received some data, or “false” if no data.
char text[32] = {0};
If the data was received, then it creates a 32-element “char” type array called “text” and filled with zeros (later the program will fill it with the received data). To read the data we use the method “radio.read (& text, sizeof (text));“. The first argument is an indicator of the variable to which you want to save the data received by the modem. To present a variable as an indicator we applied the “&” character in front of its name. The second argument is the amount of data to be stored in a variable. Here, we again have used the “sizeof ()” function, which automatically calculates the size of the “text” array.
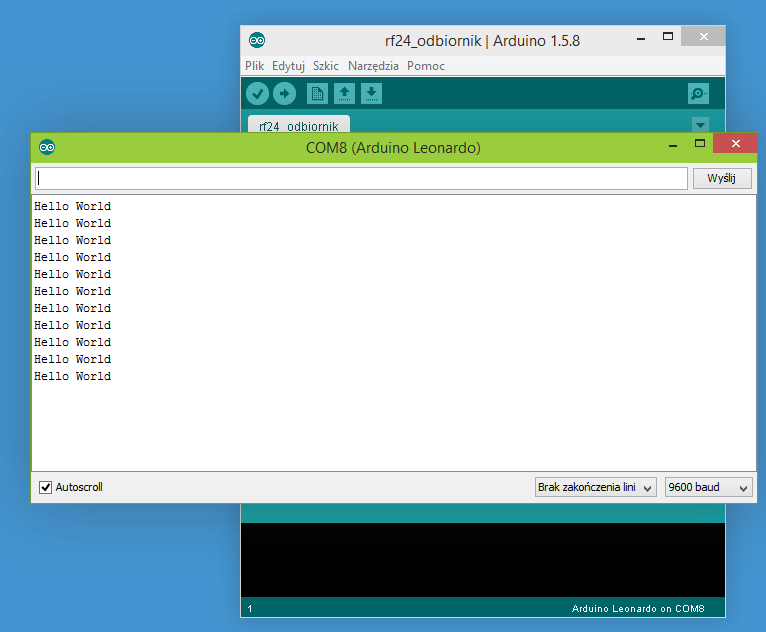
When data is received, it send’s it to the “Serial.println (text);” method. Then the received text is being sent to a computer, where you can see it in the “Serial Port Monitor” using the Arduino IDE. If you did everything ok and there are no mistakes in connections, you should see the same values in your Serial Port Monitor:
Serial Port Monitor showing communication
Stay tuned for next articles. We have connected nRF24L01 with Arduino, we will coverTeensy 3.1 and smaller µc like ATtiny
دانلود آموزش فارسی راه اندازی ماژول وایرلس NRF24L01
+کدهای گیرنده و فرستنده+کتابخانه+پاورپوینت توضیحات و شماتیک
در قالب یک پروژه کاملا عملی






















 by
by 















I was having problem with NRF24 for almost 2 weeks now (Arduino and Raspberry Pi). This is due to many misleading information out there that doesn’t work or confusing or too much information that not required for basic “Hello World” program.
After spending lots of time trying sample scripts that doesn’t work, I was almost gave up. Finally, found your website with super simple script and worked like charm on first attempt.
Your graphical guide (clean and clear) helps a lot in getting the pins connected without mistakes.
Step by step explanation on script lines helps to understand it’s function more clearer. In fact it’s a great “Hello World” tutorial that everyone can get started without issue.
Now only I know that only few lines of codes needed and it’s enough to test NRF24 “Hello World” program.
Keep up your good work. Thank you.
Hello i tried your sketch and it works thank you. But the problem I’m having is that the delay receiving it on the serial monitor is very slow it’s like instead of 1 second i get like a 5 second delay. i try to take out the delay that seems to go faster but then i get instead of a hello world once i get it like 3 times at once. can someone please help me out? thank you.
If there are radio interferences nrf makes few tries to send – maybe this is the case? Something is interfering – can You make test in another environment?
Second guess is that after some work we find that Mirf library (https://github.com/stanleyseow/arduino-nrf24l01 ) is much better in terms of stability. We will write some examples in future, but right now You can take a look at codehttps://github.com/nettigo/TinnySensorModule This sketch is for ATtiny84, but inside is folder with code for UNO to receive data.
Hi, I tried your code and it works for one or two lines but then it starts outputting gobbeltygook forever.
I’m not sure what’s going on here. At first I had the pins you point out as 7 and 8 as 9 and 10 so I changed them to 7 and 8 but it does the same thing.
new to all this – getting ARduino IDE 1.6.3 compile error shown below. I have a feeling something is pointing to the wrong area so it is not picking up all the libraries but cannot figure it out. I’ve tried changing the in the include statements to “xxx” but no change. Would greatly appreciate any help you can offer.
Arduino: 1.6.3 (Windows 7), Board: “Pro Trinket 3V/12MHz (FTDI)”
These errors are related to changes in newer IDE and compiler. I think if You fallback to 1.5.x it will work.
We plan to rewrite examples to Mirf library using newer IDE, but I can not give any estimate when it can happen.
Thank you for the info. I’ll keep plugging away at it.
Since NRF24l01 sends max of 32 bytes at a time, how do you go about sending a set of information that has 150 bytes?
What if instead of test you are sending numbers?
I am trying to send a bunch of data from some sensors.
Thanks
I was having trouble with the Arduino Micro and the NRF24l01. I found the solution on this web page
http://minspan.blogspot.com/2014/06/nrf24l01-rf24-radio-on-arduino-micro.html
Basically, the ICSP are not hooked up or hooked up wrong. You will have to use pin 11 for MISO, pin 9 for SCK, pin 10 for MOSI. The mentioned website explains it further.
Hello,
Very nice and simple Hello world example. It is pretty useful as a beginner.
No I have a question for you. Have tried to set a network of more than one nrf24l01?
i am working on the project where I am making a network4 nrf24l01 transceivers, such that one can broadcast the text message from one transceiver at the base station to all the other transceivers connected to it. After receiving the message, the transceiver should reply back to the base station in same manner.
I need your some guidance in the coding. What should be the code at base station and what could be the code at other node?
Please help..It’s urgent!!!
Thank you
can u post the schemetics for the both the transmitter and the reciever i am confused ….
should i use 2 arduino and 2 nrfl01 for communications ????? plz help some
Hi,
Thanks a lot for this tutorial. It’s great and probably the best in whole web.
I’ve run this exaple on my Arduino Due boards. I’ve just needed to write #define RF24_DUE in the code to make it works. Everything is correct and i am sending and receiving messegas on my boards.
Now I have to use the nrf24lo1 transmission with my usb host shield which uses SPI too. Does somebody knows how to initialize SPI in code for two devices – usb host shield and nrf24l01 in this case, (maybe some hardware changes are needed?)
I found the information in datasheet that shield uses pin 10 as a CS PIN, so i’ve changed it for nrf to pin 4. When i did that and stopped using port 10 for nrf24l01 my program doesn’t work anymore. I cannot even write anything on terminal using Serial.println() function.
If i use pin 10 for nrf CS again Serial port works, but nrf transmission doesn’t work.
Maybe somebody could help me.
I have an UNO and on the other hand a MEGA. The UNO works fine as a transmitter when I connect it with an external power supply where the MEGA is connected as the receiver to the computer. But when i do the vice versa of it (MEGA as transmitter and UNO as receiver) and i connect MEGA to the external power supply, no packets are received and no change is captured. Can you suggest me a solution to my problem?
These instructions worked great!
I have the ADDICORE nRF24L01+ kit and had this running within an hour. The kit comes with Male-Female connectors so it was easier to connect from the RF board to the Arduino on the digital input pins (11, 12, 13) instead of the ICSP pins.
How do I send numeric data? I need to send a byte, not text.
Thanks in advance to whoever can post some simple Arduino code to answer this question.
I figured out one way to send a number instead of a string:
Thanks a lot!
Hello
I have error in compiling here:
radio.openWritingPipe(rxAddr);
error message is here:
Arduino: 1.6.6 Hourly Build 2015/08/07 05:34 (Windows 8.1), Board: “Arduino Uno”
can help please
thanks
دانلود آموزش فارسی راه اندازی ماژول وایرلس NRF24L01
+کدهای گیرنده و فرستنده+کتابخانه+پاورپوینت توضیحات و شماتیک
در قالب یک پروژه کاملا عملی