





انکودر چیست و چه کاربردهایی دارد
انکودر چیست و چه کاربردهایی دارد
انکودر (Encoder) وسیلهای است که در ماشینهای صنعتی استفاده میشود؛ بهطورکلی انکودر به وسیلهای گفته میشود که یک حرکت مکانیکی (خطی و دورانی) را به سیگنال الکتریکی تبدیلکرده تا بتوان مشخصههای متفاوتی را از آن سیگنال مورد استفاده قرار داد، یا به طور سادهتر انکودرها وسیلهای هستند که حرکت دورانی یا خطی را به سیگنال دیجیتالی ۰ یا ۱ تبدیل میکنند؛ البته ناگفته نماند که بعضی از انکودرها خروجی آنالوگ (۰ تا ۱۰ ولت و یا ۴ تا ۲۰میلی آمپر) دارند.
یک مثال ساده از انکودر کاربردشان در سروو موتورهاست. خروجی انکودر به اینورتر مخصوص سروو منتقل میشود. در اتوماسیون صنعتی از انکودر استفادههای بسیاری میشود و تا جایی این کاربرد در اتوماسیون مهم بوده که در صنایع بستهبندی و دستگاههای صنعتی که نیاز به اندازهگیری سرعت و موقعیت است، از انکودرهای مختلف استفاده میکنند.
پارامترهایی که توسط انکودرها مشخص میگردد:
- اندازهگیری سرعت
یکی از کاربردهای مهم انکودر در کنترل سرعت الکترو موتور میباشد. برای کنترل سرعت الکتروموتور از یک اینورتر (Inverter) استفاده نموده و سرعت مورد نظر را اعمال مینمایند. آیا اینورتر به تنهایی برای اعمال سرعتی خاص و دقیق کافیست؟! کاربرد انکودر اینجا مشخص میشود؛ انکودر با فیدبکی که از الکتروموتور میگیرد در اعمال مقدار سرعت دقیق و ثابت یاری میرساند.
- اندازهگیری و کنترل موقعیت
یکی از کاربردهای مهم انکودرها در صنعت در نوارنقالهها میباشد؛ برای کارکرد نوار نقاله شما نیاز به مشخص کردن اندازهی حرکت و نقطهای مورد نظر برای توقف نوار نقاله میباشید. این مورد به راحتی با انکودر قابل انجام است. برای این منظور کافیست که خروجی انکودر اندازهگیری شده و با در نظر گرفتن ضرایب گیربکس و کوپلینگها مسافت طیشده بدست میآید که همان کنترل موقعیت میباشد.
- جهت چرخش شفت
همان راستگرد (Clockwise) و چپگرد (Counter Clockwise) چرخیدن اسپیندل میباشد.

معرفی انواع انکودرها
ا ) انکودر از لحاظ ساختمان:
- انکودرهای خطی
انکودرهای خطی دارای انواع نوری، مغناطیسی و مقاومتی بوده و برای اندازهگیری خطی استفاده میشوند. نوع نوری، دارای خروجی دیجیتال و نوع مغناطیسی و مقاومتی دارای خروجی آنالوگ میباشند. از این نوع انکودرها در دستگاههای پرس برای اندازهگیری میزان حرکت طولی پیستون و در غلتکها برای اندازهگیری فاصلهی طولی بین توپیهای غلتک استفاده میشود.

- انکودرهای چرخشی و یا دورانی
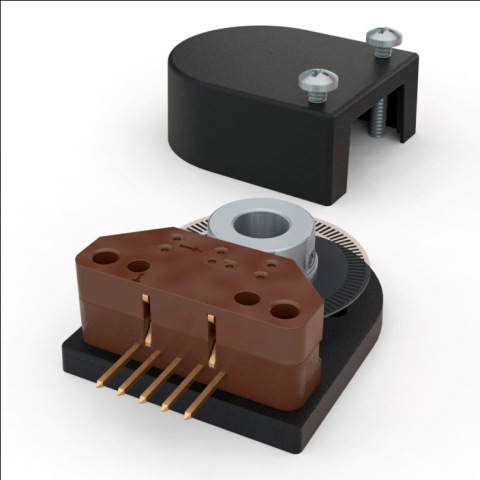
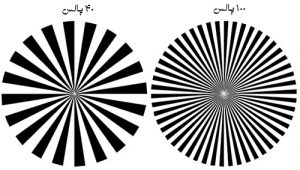
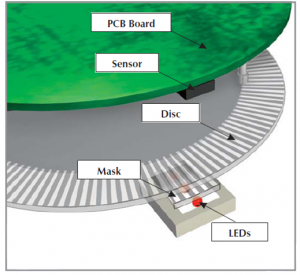
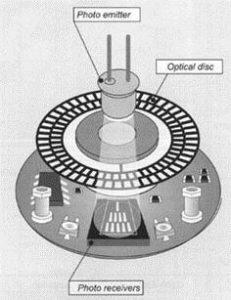
انکودر دوار یا شافت انکودر (Shaft encoder)، در واقع یک وسیلهی الکترومکانیکی است که موقعیت یا حرکت زاویهای یک شافت یا یک محور را به یک کد آنالوگ یا دیجیتال تبدیل میکند. این نوع انکودر به طور معمول از یک یا دو جفت LED فرستنده و گیرنده و یک دیسک مدرج (سیاه و سفید یا جای خالی و جای پر) استفاده میکند. دیسک مدرج مابین سنسورهای فرستنده و گیرنده قرار دارد و این مجموعه بر روی محور چرخان دستگاه قراردارد. هنگام چرخش شافت، دیسک درجه بندیشده به همراه شافت میچرخد و سنسورهای گیرنده و فرستنده ثابت میمانند. درنتیجه سیگنالی که از سمت فرستنده به گیرنده ارسال میشود توسط چرخش دیسک به طور متوالی قطع و وصل میشود به این صورت ما در ورودی گیرنده یک قطار از پالسهای متوالی صفر و یک منطقی داریم. این پالسها همان کدهایی هستند که انکودر تولید میکند و برای اینکه تبدیل به موقعیت و یا تعداد دوران شافت شود به ورودی یک دیکودر [۱] داده میشود. هر چه تعداد نقاط سیاه و سفید روی دیسک بیشتر باشد تعداد این صفر و یکهای منطقی در یک دوران کامل(۳۶۰ درجه) بیشتر میشود و در نتیجه دقت اندازهگیری آن افزایش مییابد.
۲ ) انکودرها از لحاظ عملکرد :
- نوری (Optical)
انکودرهای نوری دقیقترین نوع انکودرها هستند. وقتی یک انکودر نوری را انتخاب میکنیم خیلی مهم است که انکودر مذکور حفاظتهای اضافی برای جلوگیری از آلودگی ناشی از گرد و غبار، لرزش (vibration) و سایر شرایط رایج در محیطهای صنعتی را داشته باشد.
- مغناطیسی (magnetic)
انکودرهای مغناطیسی با وجود اینکه از انکودرهای نوری مقاومترند و اغلب در محیطهای در معرض آلودگی، بخار، لرزش و سایر انواع تداخلهای محیطی استفاده میشوند ولی قدرت تفکیک (resolution) یا دقت آنها نسبت به انکودرهای نوری پایینتر میباشد.

- خازنی (capacitive)
انکودرهای خازنی [۲] نسبت به دو مدل قبلی در دنیای صنعت تازه وارد محسوب میشوند. انکودرهای خازنی از نظر نیرومندی مانند مدلهای مغناطیسی هستند ولی قدرت تفکیکپذیری انکودرهای نوری از انکودرهای خازنی بالاتر است. البته انکودرهای خازنی بدون توجه به نوع تکنولوژی مورد استفاده قابلیت تشخیص حرکت و تبدیل آن به سیگنالهای استاندارد رایج در صنعت را دارا هستند.



۳ ) انکودرها از نظر نوع خروجی سیگنال :
- افزایشی (Incremental)
اگر انکودر فقط دارای یک ردیف پالس باشد نمیتواند به درستی جهت چرخش را نشان دهد و باید دارای پالس دومی نیز باشد که به این منظور باید یک فرستنده و گیرندهی نوری دیگر به مجموعه اضافه شود. بنابراین در لحظاتی که نمیتوان جهت چرخش شفت را تشخیص داد (در لحظاتی که هر دو پالس یک منطقی و یا صفر منطقی هستند) نیاز به پالس سومی داریم که این پالس بر اثر یک دور چرخش کامل به وجود میآید که به آن پالس فرمان میگویند و از آن برای شمارش تعداد دوران نیز استفاده میشود.

- مطلق (Absolute)
مهمترین ایرادی که بر انکودرهای افزایشی وارد است ذخیره نشدن دایمی پالسهای شمارش شده است. این نوع انکودر شمارش پالسها را در اکسترنال کانتر (Counter External) که با کوچکترین اختلالی اطلاعاتش از بین میرود، ذخیره مینماید. انکودر با از بین رفتن اطلاعات ثبت شده نمیتواند موقعیت صحیح را بدست بیاورد. برای حل این مشکل از انکودرهای مطلق استفاده میشود. انکودرهای مطلق دیسکی دارای قطعاتی به صورت دوایر با مرکز یکسان هستند که که نقطه شروع این دوایر در مرکز دیسک انکودر چرخشی است. چنانچه حلقه به سمت محیط دایره برود هر یک از آنها دارای دو برابر قطعه نسبت به حلقه قبلی و داخلیتر خود خواهند داشت اولین حلقه که داخلیترین حلقههاست یک قسمت شفاف و یک قسمت تیره خواهد داشت و حلقه سوم نیز از هر یک از قطعات ۴ قسمت خواهد داشت؛ اگر انکودر دارای ۱۰ حلقه باشد آخرین حلقه یا دورترین آن از مرکز دارای ۵۱۲ قطعه میباشد؛ چنانچه هر حلقه از انکودر مطلق دارای دو برابر قطعه از حلقه قبلی خود باشد بین شمارهها یک سیستم باینری برقرار میشود. در این نوع انکودر به ازای هر حلقه روی دیسک یک منبع نور و دریافتکنندهی آن وجود دارد.


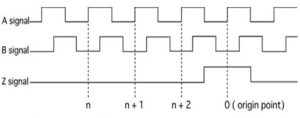
انکودرها پالسهایی تولید میکنند که مشخصکنندهی یک گردش خیلی کوچک و جزیی است. آنها در هر دور گردش نوعا از چند تا چند هزار پالس تولید میکنند. شمارش این پالسها موقعیت قرارگیری روتور را نشان میدهد (و اگر در طی یک زمان در نظر بگیریم سرعت را نتیجه میدهد). و بررسی پیش و پس بودن کانال خروجی A نسبت به کانال B بیانگر جهت گردش است (نسبت به هم متعامد هستند). انکودرها معمولا تمامی مدارهای الکترونیکی مورد نیاز را درون خود دارند که باعث حداقلشدن اتصالات در مدار بیرونی میشود؛ اما دمای عملکرد محدودی دارند.
نحوهی تولید پالس توسط انکودر افزایشی:
انکودرهای افزایشی دارای ۳ سیم خروجی هستند:
- خروجی فازA
- خروجی فازB
- خروجی فازZ
تعداد پالسهای فاز A مشابه پالسهای فاز B میباشد اما با پالسهای فاز B 90درجه اختلاف فاز مکانی دارد. از این اختلاف فاز در پیداکردن جهت چرخش انکودر استفاده میکنیم.
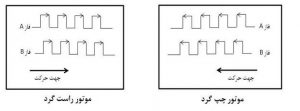
مانند شکل زیر چنانچه فاز A تقدم داشته باشد حرکت راستگرد و چنانچه فاز B تقدم داشته باشد، حرکت چپگرد خواهد بود.

[۱] در پایانه این اطلاعات توسط دستگاه دیگری به نام دیکودر (Decoder) رمزگشائی و بنا به نیاز به تعداد دوران یا سرعت زاویه ای و یا مسافت تبدیل می شود.
[۲] Capacitor Encoder
مراجع:
- http://www.peymanelectric.com/
- http://www.blog.cnccookbook.com/
- https://www.wikipedia.org/
- http://www.icesi.ir/
- http://www.practicalmachinist.com/
- http://www.ntaco.ir/
- http://www.dr-iguana.com/
- http://www.controltech.ir/
- http://www.automationz.ir/
- http://www.helalehadi.ir/
- http://www.motordrive.ir/
- http://www.elecworld.ir/
- http://www.parsautomation.com/
- http://www.directindustry.com/
- http://www.anaheimautomation.com/
- https://www.fa.wikipedia.org/wiki
