بر اساس سامانه استاندارد بینالمللی یکاها (SI)، دور بر دقیقه یک یکای استاندارد نیست. دلیل آن است که دوران و چرخش یک مفهوم معنایی است نه یک یکا. در این سامانه،کمیتهای بسامد و سرعت دورانی بهترتیب با f و ω یا Ω نشان داده شده و یکای آنها در سامانهٔ استاندارد یکاها، s−۱ یا هرتز برای بسامد و rad·s−۱ برای سرعت دورانی است.
در دینامیک، برای محاسبات سرعت دورانی و از نظر دیمانسیون، باید از یکای رادیان بر ثانیه برای سرعت دورانی استفاده شود و یکاهای دور بر دقیقه یا هرتز، همه باید به رادیان بر ثانیه تبدیل شوند.
برای این کار کافیست (rpm) را در 2П/60 ضرب کنیم
=========================
چگونه از روی گشتاور موتور، قدرت موتور را بر حسب اسب بخار محاسبه کنیم؟
این موتور قدرتی معادل ٥٢٥ اسب بخار را در ٥٦٠٠ دور در دقیقه تولید میکند!
به طور حتم جملاتی شبیه این جمله را بسیار شنیده یا خوانده اید. اما سوال اینجاست که قدرت موتور چگونه بر حسب اسب بخار محاسبه می شود؟
برای این منظور معادله ای وجود دارد که می توان از طریق این معادله با داشتن اطلاعات اولیه مانند گشتاور موتور و دور در دقیقه ؛ قدرت را بر حسب اسب بخار محاسبه نمود:
Torque * RPM ) / 5.252 = Horsepower )
به طور مثال اگر موتوری در ٤٠٠٠ دور در دقیقه در حال کار باشد و بنابر طراحی این موتور در این دور گشتاوری معادل ٣٠٠ پوند-فوت را تولید کند با استفاده از معادله بالا قدرتی معادل ٢٢٨ اسب بخار دارد .
حال سوال دیگری که ممکن است پیش بیاید این است که عدد ٥.٢٥٢ از کجا آمده است؟
پاسخ را باید این طور مطرح کرد که در واقع این عدد حاصل ضرب و تقسیم ضریب های مختلفی ست که در نهایت برای سادگی در نوشتن معادله به این صورت نوشته شده است .
اول باید بدانیم که یک اسب بخار معادل ٥٥٠ پوند-فوت در ثانیه است. پوند-فوت واحد گشتاور در سیستم انگلیسی ست که در سیستم SI معادل نیوتن متر میباشد.
با دانستن این مطلب اگر بدانیم که موتور در هر ثانیه چه گشتاوری تولید می کند در واقع می توان قدرت آن را محاسبه نمود.
اما از طرف دیگر دور موتور به طور معمول بر حسب دور در دقیقه محاسبه می شود. برای تبدیل دقیقه به ثانیه کافی ست که rpm را بر ٦٠ تقسیم کنیم و حال بعد از این کار احتیاج به عددی داریم که واحد نداشته باشد. یعنی واحد دور را باید به خاطر بدست آوردن پوند – فوت بر ثانیه از معادله به نحوی حذف نمود و راه حل این است که دور را به رادیان تبدیل کنیم. برای این کار باید rpm را در عدد 2π ضرب کنیم. پس تا به حال داریم : (2π/60) که معادل عدد ١٠٤٧٢/٠ رادیان بر ثانیه می باشد.
حال تنها کاری که باید انجام دهیم این است که تمام این اعداد را با هم در معادله قرار دهیم با تقسیم عدد ٥٥٠ پوند – فوت بر عدد ١٠٤٧٢/٠ رادیان بر ثانیه خواهیم داشت ٥.٢٥٢ که همان عددی ست که در معادله اول مشاهده کردید.
این عدد در واقع گشتاور موتور را بر ٥٥٠ تقسیم می کند و rpm را به رادیان بر ثانیه تبدیل می کند که با ضرب تمام این اعداد در نهایت قدرت موتور بدست می آید.
==================================
رادیان بر ثانیه، که با rad·s−۱ یا rad/s نشان داده میشود، یکای سرعت زاویهای در سامانهٔ SI است. رادیان بر ثانیه، همچنین یکای بسامد زاویهای نیز هست.
رادیان بر ثانیه، بهصورت تغییر جهتگیری یک جسم بر حسب رادیان در هر ثانیه تعریف میشود. با توجه به اینکه رادیان یدون دیمانسیون است، از نظر ابعادی معادل با هرتز است.
یکی از کاربردهای مهم یکای رادیان بر ثانیه، در محاسبهٔ توان منتقلشده توسط یک محور دوار است.
توان منتقلشده توسط یک محور دوار، P، (بر حسب وات) از حاصلضرب سرعت دوران محور W (بر حسب رادیان بر ثانیه) در گشتاور T موجود در محور (بر حسب نیوتن متر) بدست میآید.
p=w*T
===============================
شما مى توانید "اسب بخار" را از ضرب گشتاور در سرعت موتور بدست آورید.
اما سرعت موتور بر حسب دور بر دقیقه بیان مى شود در حالی که ما ترم "بر ثانیه" را نیاز داریم.پس نیاز داریم که (rpm) را بر حسب ثانیه بیان کنیم.
بدست اوردن ثانیه آسان است.فقط با تقسیم کردن (rpm) بر 60 مى توانیم ثانیه را از دقیقه بدست اوریم.حال به یک واحد بى بعد براى دور نیازمندیم.
رادیان, رادیان در حقیقت نسبت طول کمان دایره به طول شعاع دایره است که یک واحد بى بعد مى شود.چون واحد طول از طرفین صورت و مخرج حذف مى گردد.دور را مى توان بر حسب زاویه نیز بیان کرد.
یک دور 360 درجه از دایره است.محیط دایره نیز 2П رادیان است.پس یک دور معادل 2П رادیان است.
برای تبدیل "دور بر دقیقه" به " رادیان بر ثانیه" کافیست (rpm) را در 2П/60 ضرب کنیم.
=============================
نگرشی مختصر بر پارامتر های مکانیکی موتور های DC
هدف از این نوشتار آشنایی با عوامل مکانیکی موثر در انتخاب یک موتور DC برای کاربرد روباتیکی است. برای حرکت یک عضو روباتیکی عمدتا" چند عامل را در نظر می گیریم: نیروی لازم برای حرکت، سرعت حرکت و دقت آن. در موتور های الکتریکی حرکت به صورت دورانی است. برای ارتباط حرکت دورانی به نیرو از کمیتی به اسم گشتاور استفاده می کنیم که بیان کننده ی نیروی در دسترس در فاصله ی معینی از محور دوران است [واحد: N.m]. به عنوان مثال اگر موتور گشتاوری معادل یک نیوتون.متر تولید کند، آن گاه می تواند در فاصله ی 20 سانتی متری نیرویی به بزرگی 5 نیوتون وارد نماید. درواقع نیرو برابر است با گشتاور تقسیم بر فاصله.
سرعت دوران موتور ها را نیز با کمیتی به نام سرعت زاویه ای اندازه می گیرند. در SI واحد سرعت زاویه ای رادیان بر ثانیه است که بیان می کند یک جسم دوار چه مقدار زاویه را بر حسب رادیان در طول یک ثانیه می پیماید. معمولا" در موتور های الکتریکی از واحد دور بر دقیقه (rpm) استفاده می شود که با ضرب کردن مقدار rpm در عدد 0.105 آن را به rad/s تبدیل می کنیم. سرعت خطی یک جسم متصل به یک محور دوار از ضرب سرعت زاویه ای آن محور در فاصله ی عمودی بین محور دوارن و آن جسم به دست می آید. مثلا" اگر جسمی با یک بازو به محوری دوار وصل بوده به گونه ای که محور دارای سرعت دورانی 100 دور بر دقیقه و فاصله ی عمودی محور و جسم برابر 1 متر باشد، آن گاه بزرگی سرعت جسم 10.5 متر بر ثانیه خواهد بود.
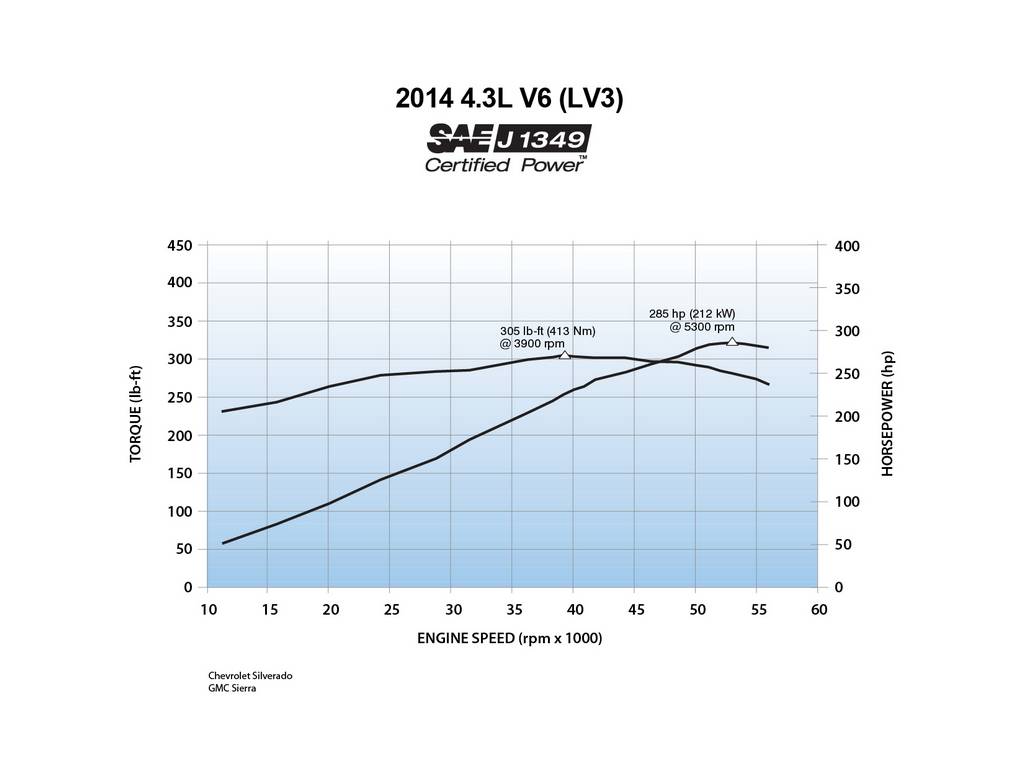
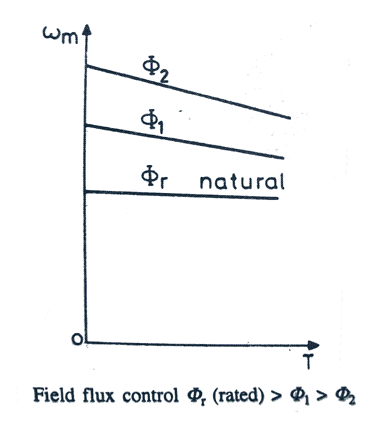
موتور های DC اگر تحت ولتاژ اسمی خود راه اندازی شوند می توانند با یک سرعت زاویه ای مشخص دوران کنند و مقدار معینی گشتاور تولید نماید. چناچه موتور زیر بار قرار گیرد (مثلا" به یک چرخ متصل شود) مقدار سرعت زاویه ای و گشتاور آن تغییر خواهد کرد و موتور جریان بیش تری از منبع می کشد. در کاتالوگ یا datasheet موتور های DC معتبر معمولا" نمودار rpm بر حسب گشتاور وجود دارد که بیان می کند در یک rpm مشخص مقدار گشتاور تولیدی چقدر خواهد بود. اگر مقدار گشتاور را در سرعت زاویه ای ضرب کنیم کمیتی به نام توان به دست می آید که نشان دهنده ی نرخ زمانی مصرف انرژی است [واحد وات].
حداکثر سرعت زاویه ای موتور در حالت بی باری را No Load Speed یا Free RPM می نامند. در سرعت بی باری مقدار گشتاور تولیدی را صفر در نظر می گیریم. حداکثر گشتاور تولیدی (Stall Torque) زمانی خواهد بود که دور موتور به صفر برسد. البته مقداری که عموما" با آن سر و کار خواهیم داشت Rated Torque یا Nominal Torque نام دارد که مبین گشتاور بیشینه ایست که به طور پیوسته در اختیار است بدون آن که به موتور آسیبی وارد آید.
جعبه دنده یا گیربکس ماشینی است که همراه موتور الکتریکی به کار می رود. گیربکس به عنوان یک سیستم سرعت دورانی و گشتاور را از موتور دریافت می کند و سرعت و گشتاور مطلوب را به عنوان خروجی تحویل می دهد. بدین ترتیب می توانیم از یک موتور در کاربرد های مختلف بهره گیریم. گیربکس ها قادر اند مقدار گشتاور را کاهش و یا افزایش دهند اما همواره نسبت بین گشتاور و سرعت زاویه ای و گشتاور خروجی عکس خواهد بود یعنی جعبه دنده ای که گشتاور ورودی را فزایش می دهد، سرعت زاویه ای ورودی را کاهش می دهد. برای روشن تر شدن قضیه به این مثال توجه کنیم: با اتصال یک جعبه دنده با نسبت 5:1 به موتوری با سرعت 500 rpm و گشتاور تولیدی 0.2 N.m در خروجی سیستم 100 rpm و 1 Nm را خواهیم داشت.
==========================
البته خود گشتاور هم نیرو نیست. گشتاور = نیرو ضربدر بازوی اعمال نیرو
نیرو
یرو موجب شتاب می شود . اگر شما یک نیرو به ماشین اسباب بازی وارد کنید ،
مثلاً : ( با دست خود آن را هل دهید ) ، شروع به حرکت می کند . ممکن است
ساده به نظر آید ، اما این یک حقیقت خیلی مهم است .
f=ma یا a=f/m
( f : نیرو و m : جرم و a: شتاب )
واحدهای رایج برای جرم :
1g=0.001kg Gram(g) : SI سیستم
یک نیوتون نیروی ، برای اینکه به یک جسم یک کیلوگرمی شتاب 1 متر بر مجذور ثانیه داده شود ، کافی است .
زمین به جسم های در حال سقوط نیروی کافی وارد می کند تا شتاب 9/8 متر بر
مجذور ثانیه یا 32 فوت بر مجذور ثانیه بگیرند . این نیروی گرانشی اغلب در
معادلات با علامت g نشان داده می شود . اگر جسمی را از یک تخته سنگ پایین
پرتاب کنید ، به ازای هر ثانیه ای که در حرکت رو به پایین باشد ، سرعت 9/8
متر بر ثانیه افزایش می یابد . بنابراین اگر در مدت زمان 5 ثانیه سقوط کنید
، در هنگام رسیدن به زمین 49 متر بر ثانیه سرعت دارد .
گشتاور خروجی موتور خودرو چیست ؟
عامل مؤثر در گشتن هر جسم به دور محوری را گشتاور نیرو یا لنگر و یا تورک ( Torque ) مینامند .
گشتاور یک کمیت فیزیکی است در حرکت چرخشی که به بزرگی نیرو و مسیر و مکان اثر نیرو بستگی دارد . گشتاور یک کمیت برداری بوده و یکای آن در سامانه استاندارد بینالمللی یکاها، نیوتن متر است .
از تعریف فوق جز مهندسین مکانیکی که علاقه به این مبحث را دارند ، بیشتر کسی متوجه نخواهد شد ، البته این تعریف بسیار کامل ، جامع و درست است ، ولی در زبان خودرو ، که همه چیز به سادگی مطرح می¬شود ، این تعریف جایگاهی ندارد .
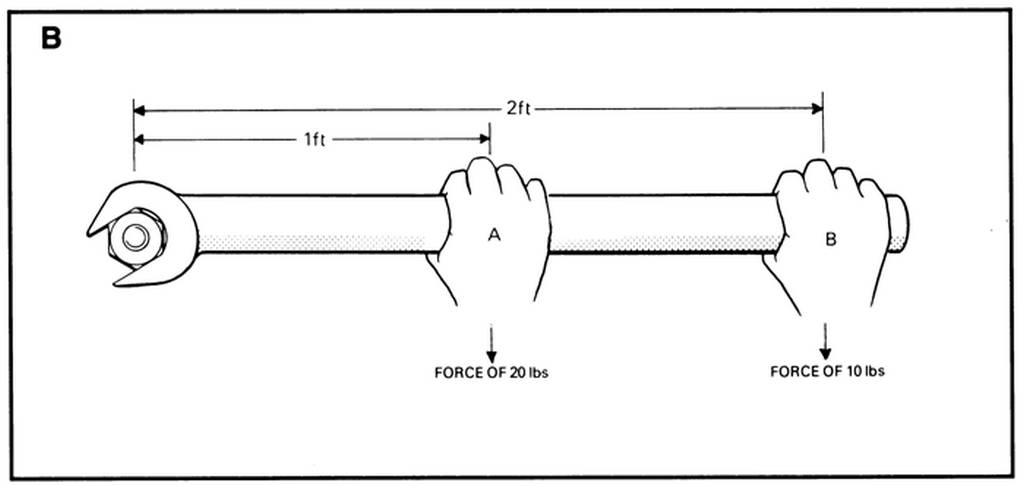
گشتاور به معنی ، نیروی وارد شده ( نیروی اعمال شده ) به جسمی می باشد ، که از فاصله محل وارد شدن نیرو به محلی که قرار است نیرو به آن وارو شود ، فاصله ای وجود داشته باشد ( حتی اگر این فاصله 1 میکرو متر یا یک میلیونوم متر باشد ) .

به عنوان مثال ، زمانی که آچاری را برای سفت نمودن پیچی استفاده می نمایید ، از دست شما که آچار را نگه داشته است ، به پیچی که در حال سفت نمودن آن هستید ، گشتاوری وارد می-شود . برای محاسبه این گشتاور ، میزان نیرویی که دست شما به آچار وارد می نماید را در طول آچاری که مورد استفاده قرار می دهید ، ضرب نموده و عددی که بدست می آید بر حسب نیوتن متر و یا پوند بر فوت می باشد .
در خودرو این اعداد با توجه به دستگاه دینامومتر (Dinamometro ) بدست می¬آید . البته همیشه بر روی نمودار ، اسب بخار بر حسب دور بر دقیقه ، نمودار دیگری وجود داشته که تورک به آن گویند و آن نیز بر حسب دور بر دقیقه سنجیده می شود .
برای اینکه درک بهتری از تورک داشته باشیم باید به این نکته اشاره داشته باشم ، که همه ما در موقع رانندگی پس از رسیدن به دور موتوری خاص ، نسبت به تعویض دنده اقدام می-نماییم ( در سیستم تعویض دنده دستی ) ، البته در خودروهایی که دارای جعبه دنده اتوماتیک هستند ، اینکه در چه دور موتوری عمل تعویض صورت گیرد با توجه به نوع رانندگی و نوع برنامه پیش فرض برای رانندگی در نظر خواهند گرفت .

البته این را باید بدانیم که موتور هر خودرویی در یک دور موتور مشخص حداکثر خروجی گشتاور را در اختیار راننده قرار می دهد و این دور موتور که به صورت بازه و یا عددی خاص بوده است را ، بهترین زمان تعویض دنده بوده و بهترین حالت مصرف سوخت خودرو را اکثرا در این دور موتور بدست می آورند .
پس دانستن حداکثر گشتاور خودرو که در چه دور موتوری در اختیارمان قرار خواهد گرفت به ما کمک نموده تا بتوانیم ، بهترین زمان تعویض دنده را انتخاب نماییم و به بهترین سیکل مصرف سوخت برسیم .







-500x500.jpg "ماژول رله 5 ولت دو کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت دو کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت دو کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت دو کاناله OMRON SSR")






-500x500.jpg "ماژول رله 5 ولت هشت کاناله")
-500x500.jpg "ماژول رله 5 ولت هشت کاناله")


-500x500.jpg "ماژول رله 5 ولت هشت کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت هشت کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت هشت کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت هشت کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت هشت کاناله OMRON SSR")

-500x500.jpg "ماژول رله 5 ولت چهار کاناله")
-500x500.jpg "ماژول رله 5 ولت چهار کاناله")



-500x500.jpg "ماژول رله 5 ولت چهار کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت چهار کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت چهار کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت چهار کاناله OMRON SSR")
-500x500.jpg "ماژول رله 5 ولت چهار کاناله OMRON SSR")


















 ایمیل نمائید تا آن را با نام خودتان در سایت منتشر کنیم.
ایمیل نمائید تا آن را با نام خودتان در سایت منتشر کنیم.

![[تصویر: Torque_animation.gif]](http://upload.wikimedia.org/wikipedia/commons/0/09/Torque_animation.gif)