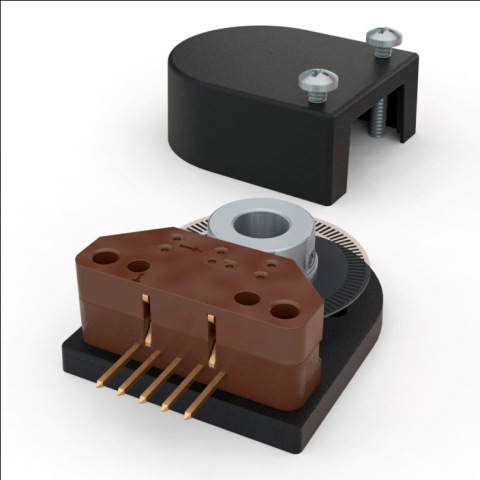
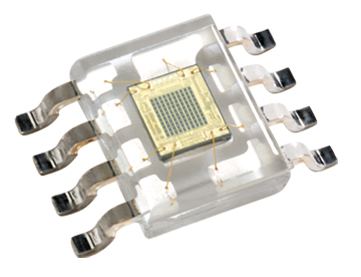
در این بخش به معرفی مختصری(در حد چند خط) از سنسور ugn3503 – سنسور اثر هال مغناطیس میپردازیم اساس کار در این سنسور بدین صورت میباشد در حالت عادی در صورتی که درمجاورت میدان مغناطیسی نباشد یک ولتاژ ثابت خروجی حدود۲٫۵ ولت (حدود نصف ولتاژ تغذیه)در خروجی سنسور داریم درضمن رنج ولتاژ کاری این سنسور بین ۴٫۵ تا ۶ ولت میباشد و جریان کاری این سنسور بین ۹ تا ۱۴ میلی آمپر میباشد.
در چندین پست قبلی سنسور اثر هال Ugn3505 معرفی گردید که میتوانید جهت دیدن ان مطلب اینجا کلیک کنید،این سنسور را میتوان برای اندازه گیری جریان الکتریکی ، اندازه گیری دور موتور و … مورد استفاده قرار داد.
این سنسور دارای ۳ پایه میباشد که دو پایه ان به تغذیه متصل شده و پایه سوم ان خروجی میباشد. راه اندازی این سنسور بسیار راحت میباشد چون خروجی ان انالوگ است و میتوان با اندازه گیری ولتاژ این سنسور توسط میکرو مقدار خروجی این سنسور را اندازه گیری نمود.

برای شروع کار میتوانید این سنسور را به ۵ ولت DC متصل نمایید و به خروجی سنسور یک ولتمتر وصل نمایید که در حالت عادی در خروجی سنسور باید ولتاژی حدود ۲٫۵ ولت داشته باشد
حال یک اهنربا بردارید به طرف پشت سنسور نزدیک کنید و و هر چه اهنربا را به پشت سنسور نزدیک میکنید مقدار ولتاژ خروجی افزایش پیدا میکند و یا میتوانید به این صورت عمل کنید که یک تکه اهنربا کوچک به پشت سنسور بچسبانید و حالا با نزدیک کردن یک تکه آهن به جلوی سنسور مقدار خروجی سنسور افزایش می یابد .
در این قسمت یک پروژه دورسنج با استفاده از این سنسور را برای شما قرار میدهیم که خروجی سنسور ugn3503 به یک اپ امپ LM358 متصل شده است که داخل این ای سی دو تا اپ امپ قرار دارد که در زیر نقشه شماتیک ان آورده شده است.

خروجی سنسور ابتدا به یک اپ امپ رفته است که در حالت بافر مثبت قرار دارد و بعد خروجی این اپ امپ به ورودی مثبت اپ امپ دوم متصل شده و به وردی منفی اپ امپ دوم یک پتانسیومتر ( مولتی ترن ) متصل شده که این اپ امپ در حالت مقایسه کننده استفاده شده است و با تنظیم پتانسیومتر ( مولتی ترن ) میتوانید حساسیت را تغییر دهید.
با نزدیک شدن اهنربا به پشت سنسور (که میزان حساسیت ان با پتانسیومتر تنظیم میشود) خروجی دومین اپ امپ یک منطقی شده و ال ای دی که به خروجی اپ امپ متصل شده است روشن میشود.

همانطور که در عکس بالا مشاهده میکنید از خروجی اپ امپ دوم به یک اپتوکوپلر متصل شده است که از اپتوکوپلر SFH615 استفاده شده است و از خروجی اپتوکوپلر به ورودی کانتر ای سی ATMEGA8 متصل شده است.
در این قسمت برای شروع ازمایش اولیه میتوانید یک اهنربا کوچک را به شفت یک موتور متصل کنید که با روشن شدن موتور اهنربا شروع به چرخش میکند و حال سنسور را نزدیک شفت بایرید و با تنظیم پتانسیومتر میبینید که به ازای هر دور چزخش موتور ال ای دی یک چشمک میزند.
حال اگر شما تعداد چرخش موتور را در یک ثانیه بشمارید مقدار دور موتور در ثانیه بدست میاید و اگر این مقدار را در عدد ۶۰ ضرب کنید مقدار دور موتور در دقیقه بدست میاید که به آن RPM میگویند ( RPM = تعداد در در یک دقیقه )
میکرو ATMEGA 8 تعداد پالسی را که از خروجی اپتوکوپلر به کانتر ۱۶ بیتی ان متصل شده است را در مدت زمان یک ثانیه میشمارد و سپس مقدار بدست امده را در عدد ۶۰ ضرب میکند به این ترتیب دور موتور در یک دقیقه شمارش میگردد.
نکته:تنظیم کردن حسایت سنسور بسیار مهم میباشد چون اگر به دقت تنظیم نشود مقدار بدست امده درست نیست به همین دلیل باید به جای پتانسیومتر از مولتی ترن استفاده نماید.
زبان مورد استفاده برای برنامه نویسی میکرو بیسیک میباشد . برای اندازه گیری زمان دقیق یک ثانیه از تایمر “۲” میکرو در مد اسنکرون استفاده شده و به میکرو کریستال ۳۲٫۷۶۸ کیلو هرتز متصل شده است که تایمر دو کلاک خود را از این کریستال دریافت میکند.

در هر یک ثانیه یک ال دی که به پورت D.0 متصل شده است یک بار روشن ویک بار خاموش میشود.
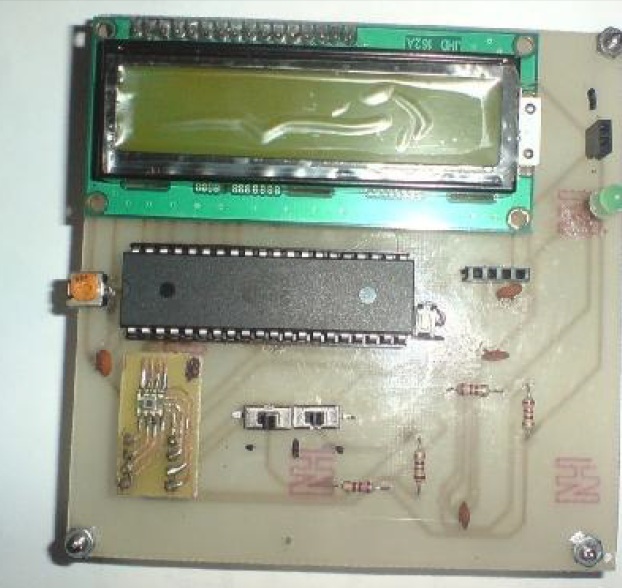
جهت نمایش اطلاعات از ال سی دی ۱۶*۲ استفاده شده است.
سوکت JP1 که با نام programmer con مشخص شده است جهت برنامه ریزی میکرو استفاده میشود که میتوانید از هرنوع پروگرامر مثل STK200-300 استفاده نمایید.
برای راه اندازی مدار باید ولتاژ ۱۲ ولت DC را با رعایت قطبیت به کانکتور J3 وصل نمایید.
جهت دریافت فایل شماتیک و برنامه مدار و همچنین دیتاشیت این ای سی روی لینک زیر کلیک نمایید.
========================================
http://www.aliexpress.com/item/1set-Digital-Laser-Tachometer-RPM-Meter-Non-Contact-Motor-Speed-Gauge-Revolution-Spin-Brand-New/32472075264.html?spm=2114.031010208.3.1.B4qZZ4&ws_ab_test=searchweb201556_3,searchweb201644_3_79_78_77_82_80_62_81,searchweb201560_2,searchweb1451318400_6148
===========================================
http://wle.ir/3566/پروژه-دور-سنج-با-سنسور-اثر-هال.html
http://yazdkit.com/tachometer-with-ugn3503-3784.html
===================================================
مثل ugn3113: از این نوع سنسور تو فن کامپیوتر برای مشخص کردن سرعت چرخش فن استفاده میشه.
===================================================
یک برچسب سفید میزنم روی شفت بعد با تابش و بازتابه ir (سنسورcny70) تعداد دور دو میشمارم
=========================================
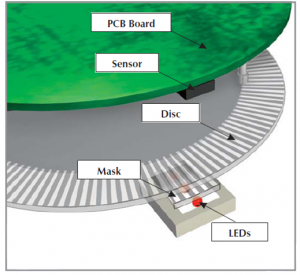
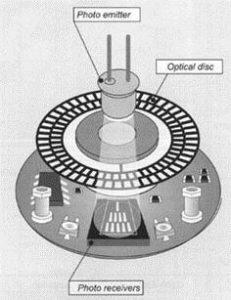
این روتاری انکودر یک وسیله اندازه گیری و فیدبک گیریه که مثل شفت انکودر میمونه
درمورد آپتوکانتر هم بازم باید با شفت اتصال فیزیکی داشته باشیم
========================================
سنسور های proximity
یه راه دیگه استفاده از سنسور های proximity که اصطلاخا پراکسی بهش می گن وای قیمت شون زیاده

































مجید
با سلام و خسته و نباشید
ببخشید مجدد مزاحم میشم برای دریافت سیگنال های خروجی انکودر باید سیم های مربوط به فازهای A وB انکودر را به کدوم ورودی برد آنالیزگر متصل کرد :۱-آنالوگ ۲-دیجیتال؟؟
میلاد موسوی
سلام
خروجی انکودر ها سیگنال دیجیتال هستش
سلام
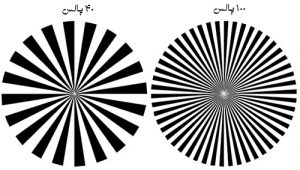
میخاستم بدونم برای محاسبه سرعت خطی دو راهنمای اره میخاهیم از انکودر چرخشی استفاده کنیم که به پینیون و چرخدنده نواری متصل بشه و مقدار سرعت دورانی را به سرعت خطی تبدیل کنه و روی ال سی دی نشون بده. از طرفی سرعت اره بسیار پایین هست و دقت حرکتی ک ما از این اره داریم در حد ۰٫۳-۰٫۵ سانتیمتر هست. آیا انکودر ۴۰۰ پالسی این نیاز را برطرف میکنه؟ باتشکر
میلاد موسوی
سلام
ببینید دوست گرامی انکودر ها هرچقدر تعداد پالشون بالاتر باشه دقتیشون بیشتره الان من با مثلا خدمتتون عرض میکنم:
الان انکودر شما ۴۰۰ پالس هستش یعنی برای هر ۳۶۰ درجه چرخش به شما ۴۰۰ پالس میده که اگر شما ۳۶۰/۴۰۰ بکنی عددی معادل ۰٫۹ درجه رو به شما میده
یعنی این انکودر هر ۰٫۹ درجه که حرکت در خروجیش انجام میشه به شما یک پالس میده.
حالا شما باید ی تبدیل روی دستگاه انجام بدید و تست کنید: به اندازه ۱ سانتی متر خروجی رو حرکت دهید و ببینید چند درجه انکودر شما حرکت میکنه.اگر با این مقدار حرکت شما بیش از ۳ یا ۴ پالس دریافت کرده یعنی تقریبا برای کار شما مناسب است و اگر تعداد پالس کمتری دریافت کردید این یعنی این انکودر برای کار شما مناسب نیست و باید انکودر با پالس بالا تر انتخاب کنید.
اگر هم هنوز این انکودر بر روی شما نصب نیست باید این محاسبات رو تئوری انجام بدید:
باید ضریب اتصال و کوپلینگ انکودر رو محاسبه کنید و ببینید با هر بار چرخش کامل انکودر شما چه مقدار حرکت خطی دارید و آن را به سانتی متر محاسبه و بدست بیاورید
موفق باشید
با سلام و خسته نباشید بنده دانشجوی مهندسی مکانیک ترم ۶ هستم و مدتی هست در باره ی ساخت ربات پاندول معکوس تحقیق میکنم و پروژه کارشناسی بنده هم ساخت پاندول معکوس هست میخواستم بدونم چطوری سیگنال های خروجی انکدر را شناسایی کنم و مطلب مهمی که استاد راهنمای پروژه بنده را موظف به دونستنش کرده اینه که چجوری انکدر را به کامپیوتر متصل کنیم میخواستم بدونم شما اطلاعی در مورد این قضیه دارید